ロボット工学における小型フレキシブルカップリングの概要
急速に進化するロボット工学の世界では、ロボット工学用の小型フレキシブルカップリングは、精度と適応性の間のギャップを埋める重要なコンポーネントとして際立っています。これらのコンパクトなデバイスはロボット システムのシャフトを接続し、位置ずれや振動に対応しながらスムーズな動きの伝達を可能にします。スペースに制約のある用途向けに設計されたロボット工学用の小型フレキシブルカップリングは、最も複雑な機構であっても最小限のバックラッシュと高効率で動作することを保証します。ロボット工学が製造、医療、オートメーションなどの業界に浸透し続けるにつれて、信頼性の高いパフォーマンスを達成するには適切なカップリングを選択することが不可欠になります。この記事では、これらの革新的なコネクタの機能、利点、用途について詳しく説明し、現代のロボット設計にコネクタが不可欠である理由を強調します。
小型フレキシブルカップリングの主な特長
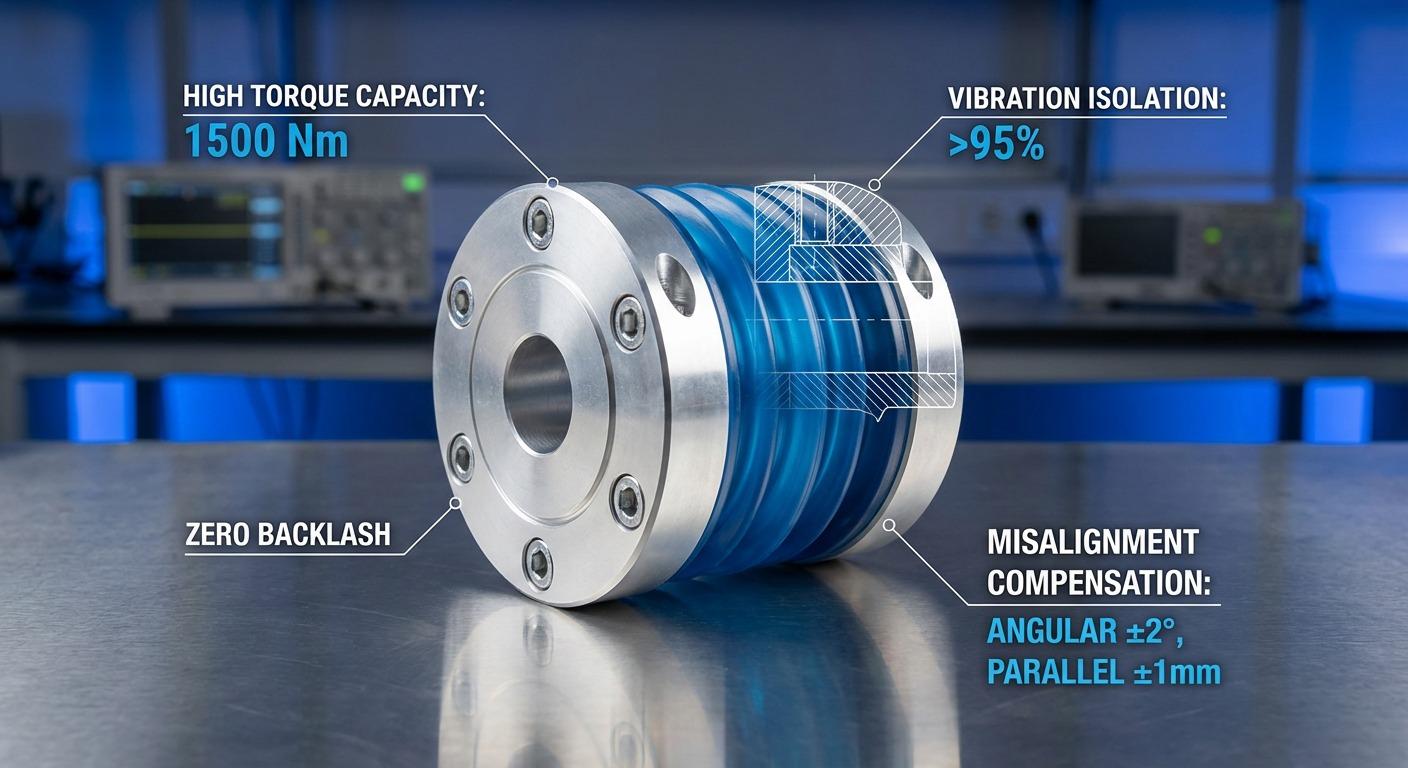
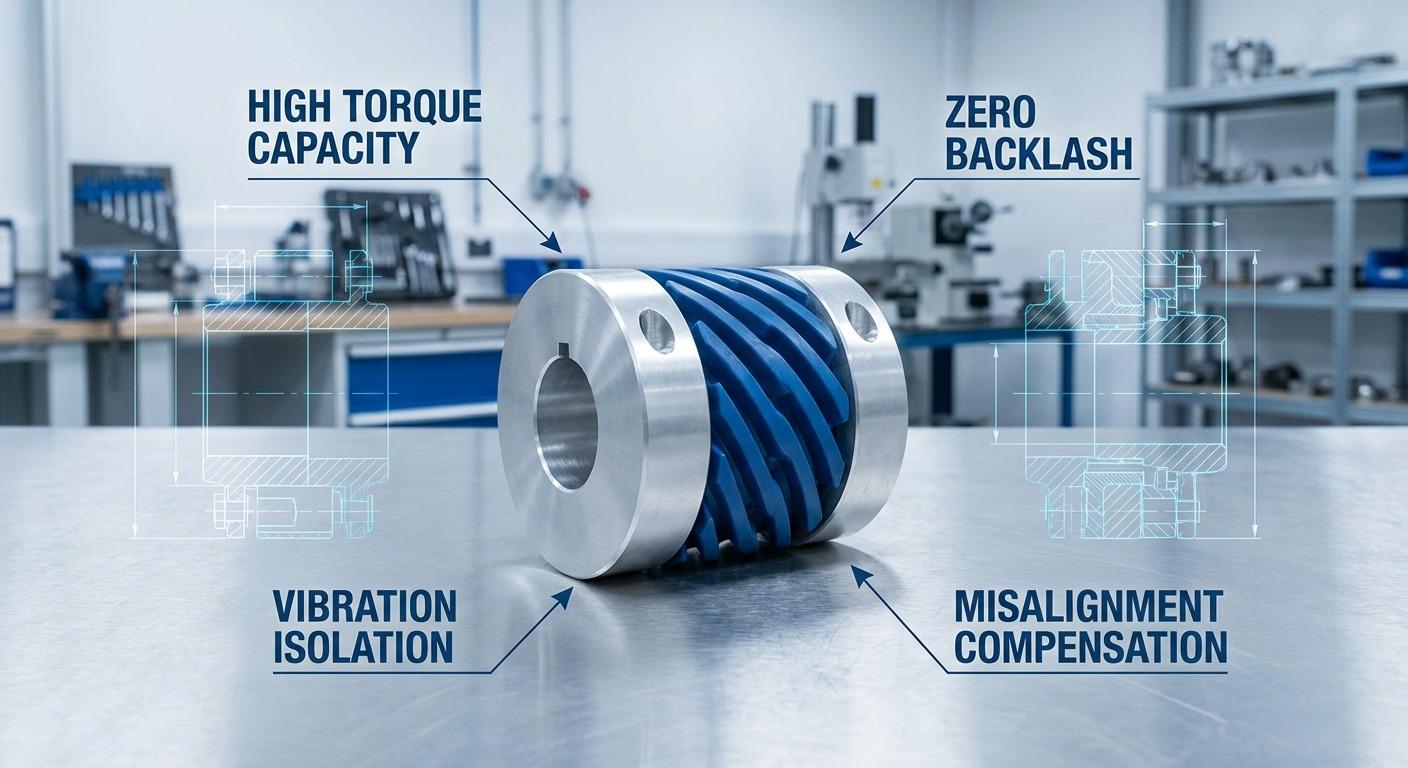
ロボット工学用の小型フレキシブル カップリングの背後にあるエンジニアリングは、正確な動作制御に不可欠なゼロ バックラッシュと優れたねじり剛性を実現することに重点を置いています。際立った特長の 1 つは、エネルギー損失のないシームレスな動力伝達を可能にする動的トルク伝達能力です。これは、わずかな偏差でも精度が損なわれる可能性があるサーボ モーターのセットアップでは特に重要です。高品質の素材で作られたこれらのカップリングには、振動を減衰し、角度または平行のミスアライメントを補正するハーモニックドライブ要素などの高度な設計が組み込まれています。たとえば、ロボット アームでは、ロボット用の小型フレキシブル カップリングが力の無効化と方向転換を処理し、動的負荷の下でもシステムのアライメントを維持します。さらに、そのコンパクトなフォームファクターは、多くの場合数センチメートル以下であるため、スペースが貴重な小型ロボットやドローンへの統合に最適です。信頼性ももう 1 つの特徴であり、これらのカップリングは、埃っぽい工場の床から無菌の医療現場に至るまで、繰り返しのサイクルや過酷な環境に耐えるように構築されています。
業界を超えたアプリケーション
ロボット工学向けの小型フレキシブル カップリングは汎用性が高く、幅広い業界にとって頼りになるソリューションとなっています。ロボット工学において、これらのカップリングは関節機構に優れており、ピックアンドプレース操作や外科手術などの作業にスムーズで正確な動きを提供します。医療技術分野では、ロボット支援手術における精密な器具操作が可能となり、患者へのリスクを最小限に抑えることができるため、その精度の恩恵を受けています。製造業のオートメーション ラインは、コンベア システムとロボット グリッパーを同期させるためにこれらを利用し、機械的故障を発生させずにスループットを向上させます。高速印刷機の微調整が必要な印刷業界でも、ロボット用の小型フレキシブルカップリングは安定したトルク供給を保証し、ダウンタイムを削減し、印刷品質を向上させます。 OEM アプリケーションでは、その堅牢性がさらに強調されます。これらのカップリングは複雑な機械向けにカスタマイズされており、協働ロボット (コボット) から自律移動ロボット (AMR) まであらゆるものをサポートします。振動減衰や位置ずれ補正などの重要な要素に対処することで、ロボット コンポーネントの寿命を延ばし、最終的にはメンテナンス コストを削減します。
モーション制御と効率における利点
ロボット工学用の小型フレキシブル カップリングの特徴は、モーション テクノロジーの標準を再定義できることです。スムーズな精度に重点を置いたこれらのコネクタは、早期摩耗につながる応力集中など、リジッド カップリングにありがちな落とし穴を排除します。優れたねじり剛性はサーボ駆動システムの即時応答時間につながり、ロボットが複雑なパスをピンポイントの精度で実行できるようになります。高トルクのシナリオでは、動的動力伝達により滑りが防止され、負荷が変化しても効率が維持されます。ロボット工学エンジニアにとって、これは、持続可能な製造慣行の推進に合わせて、より高速であるだけでなく、よりエネルギー効率の高いシステムを設計することを意味します。さらに、このカップリングはさまざまなシャフト サイズやタイプ (ベローズ、ディスク、ジョー スタイルのいずれであっても) に適応できるため、試作と生産に柔軟性がもたらされます。耐食コーティングと耐疲労合金によって耐久性が強化され、温度変動や化学薬品への曝露などの困難な条件下でも最適な動作が保証されます。その結果、これらのカップリングを採用している企業は、中断が減り、全体的な生産性が向上し、システムの信頼性が向上したと報告しています。
適切な小型フレキシブル カップリングの選択
ロボット工学に適した小型フレキシブル カップリングを選択するには、いくつかの要素を慎重に考慮する必要があります。まず、ロボット アプリケーションのトルク要件と動作速度を評価します。高いねじり荷重に耐えられるカップリングは、要求の厳しい環境で最高のパフォーマンスを発揮します。位置ずれの許容度も重要な指標です。パフォーマンスを損なうことなく、最大 2 度の角度オフセットを処理できるモデルを選択してください。コンパクトなロボット工学では取り付けの容易さが非常に重要であるため、特殊な工具を使用せずに迅速に組み立てられるクランプ スタイルまたは止めネジのデザインを探してください。実世界のシミュレーションでテストすると、カップリングが振動をどの程度適切に管理し、ハーモニックドライブや減速機とシームレスに統合できるかを明らかにできます。 OEM カスタマイズを重視する信頼できるサプライヤーと提携することで、フィードバック ループ用の統合エンコーダーなどの機能を組み込んで、カップリングをお客様の仕様に合わせて調整できます。これらの側面を優先することで、ロボット開発者はこれらのコネクタの可能性を最大限に活用し、自動化システムで可能なことの限界を押し上げるイノベーションを促進できます。
ロボット工学におけるフレキシブル カップリングの未来
将来を見据えると、ロボット工学用の小型フレキシブルカップリングは、次世代のインテリジェントマシンで主役の役割を果たす準備が整っています。 AI 駆動のロボティクスが進歩するにつれて、摩耗とアライメントをリアルタイムで監視するためのセンサーを統合した、さらに小型でスマートなカップリングの需要が高まるでしょう。この進化により、ロボットが動作中に自己修正できるようになり、人間の介入が減り、適応性が向上することが期待されます。機敏なロボットが動的な倉庫内を移動する物流などの業界では、これらのカップリングにより、より高速で正確な動きが可能になり、サプライチェーンが最適化されます。フレキシブル シャフト コネクタの精度と信頼性への取り組みは、モーション コントロールが適応性と調和し、分野全体で効率を向上させる未来を強調します。ロボット愛好家や専門家にとって、これらのテクノロジーを採用することは、イノベーションの最前線に留まり、すべての機械的リンクがよりつながり、より機能的な世界に確実に貢献することを意味します。継続的な進歩により、ロボット工学用の小型フレキシブル カップリングは、信頼性の高い高性能システムの基礎であり続けるでしょう。